Enhancing AV Localization in AWARE2ALL DEMO2: Safer Travel for People with Reduced Mobility

Automated vehicles rely heavily on precise positioning systems to safely navigate roads, avoid obstacles, and reach their destinations effectively. This precision becomes critically important when transporting individuals with mobility challenges, whose disabilities often restrict their ability to compensate for unexpected movements or reposition themselves comfortably. Any inaccuracies in positioning could result in abrupt vehicle maneuvers, potentially causing discomfort, anxiety, or even injury for passengers with limited mobility. Therefore, improving the accuracy and reliability of vehicle positioning systems isn't merely a technical enhancement—it's essential for ensuring the safety, comfort, and independence of people with disabilities, allowing them to travel confidently and securely.
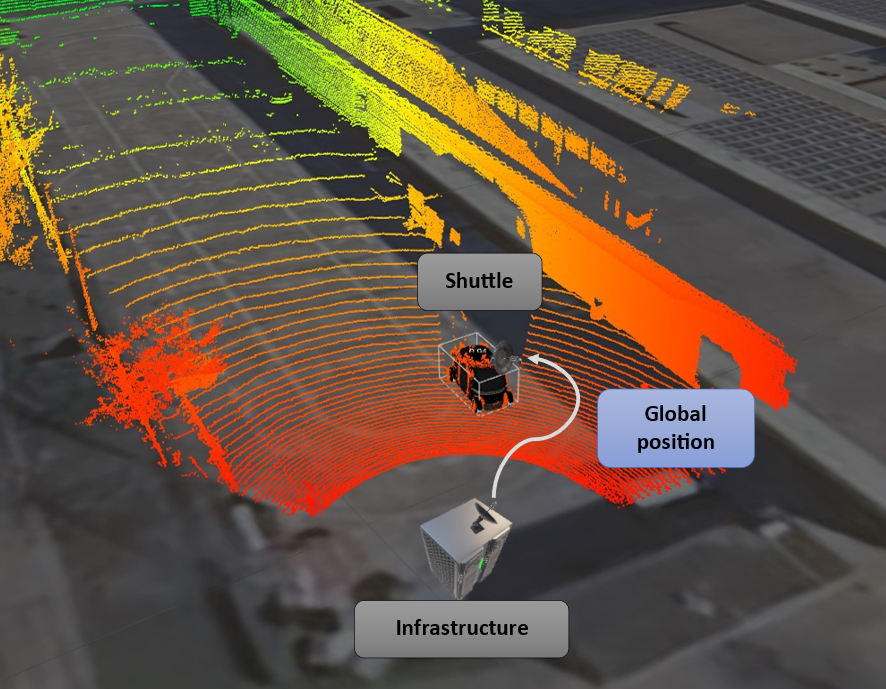
To address this issue, we propose Advancing Autonomous Shuttle Localization: Infrastructure-Based Positioning and Fault Tolerant Localization. As part of our ongoing research into enhancing autonomous mobility, we have made significant strides in developing an infrastructure-based positioning system tailored to localizing an autonomous shuttle. Moreover, we have successfully integrated this system with a fault-tolerant localization system, enabling seamless fusion of in-vehicle and infrastructure-based localization sources.
The infrastructure-based positioning system, specifically designed for autonomous shuttle applications, utilizes a combination of advanced sensors and positioning technologies to provide accurate and reliable location data. By calibrating and fine-tuning this system, we have achieved enhanced performance in real-world scenarios, demonstrating its potential for widespread adoption in autonomous shuttle deployments.
Complementing this achievement is the development of a fault-tolerant localization system, designed to provide robust and reliable positioning in the face of sensor failures or data inconsistencies. By integrating the infrastructure-based positioning system with in-vehicle sensors and mapping data, we have created a resilient localization framework capable of adapting to changing environmental conditions and sensor failures.
To evaluate the performance of this integrated system, we conducted a series of experiments in real-world settings, focusing on the accuracy and reliability of the fault-tolerant localization system. The results show promising advancements in maintaining positioning accuracy even when individual sensors or data sources become unreliable.
These developments will play a critical role in enhancing the overall performance and safety of autonomous shuttles, paving the way for widespread deployment in various transportation environments.
Key highlights of this achievement include:
- Fine tuning of an infrastructure-based positioning system optimized for autonomous shuttle localization
- Creation of a fault-tolerant localization system integrating in-vehicle and infrastructure-based localization sources
- Enhanced performance in real-world scenarios through calibration and fine-tuning
- Successful evaluation of the integrated system in real-world experiments, demonstrating improved accuracy and reliability
These advancements showcase our commitment to driving innovation in autonomous mobility and demonstrate our expertise in developing cutting-edge technologies that will shape the future of transportation.
For further information or to inquire about collaboration opportunities, please contact Sergio Diaz Briceño sergio.diaz@tecnalia.com from TECNALIA.